Ouster has integrated native color capabilities into its Rev8 LiDAR sensor for the BlueCity autonomous vehicle platform. The addition moves beyond traditional monochrome point clouds to capture RGB data directly from the sensor, creating richer environmental perception for self-driving systems.
Color LiDAR addresses a persistent limitation in autonomous vehicle development. Standard LiDAR excels at generating 3D spatial maps but delivers limited contextual information about road conditions, traffic signs, lane markings, and pedestrian clothing. Adding native color directly to the LiDAR output eliminates the need for separate camera fusion and reduces computational overhead. The Rev8 now captures both depth and color in a single sensor stream.
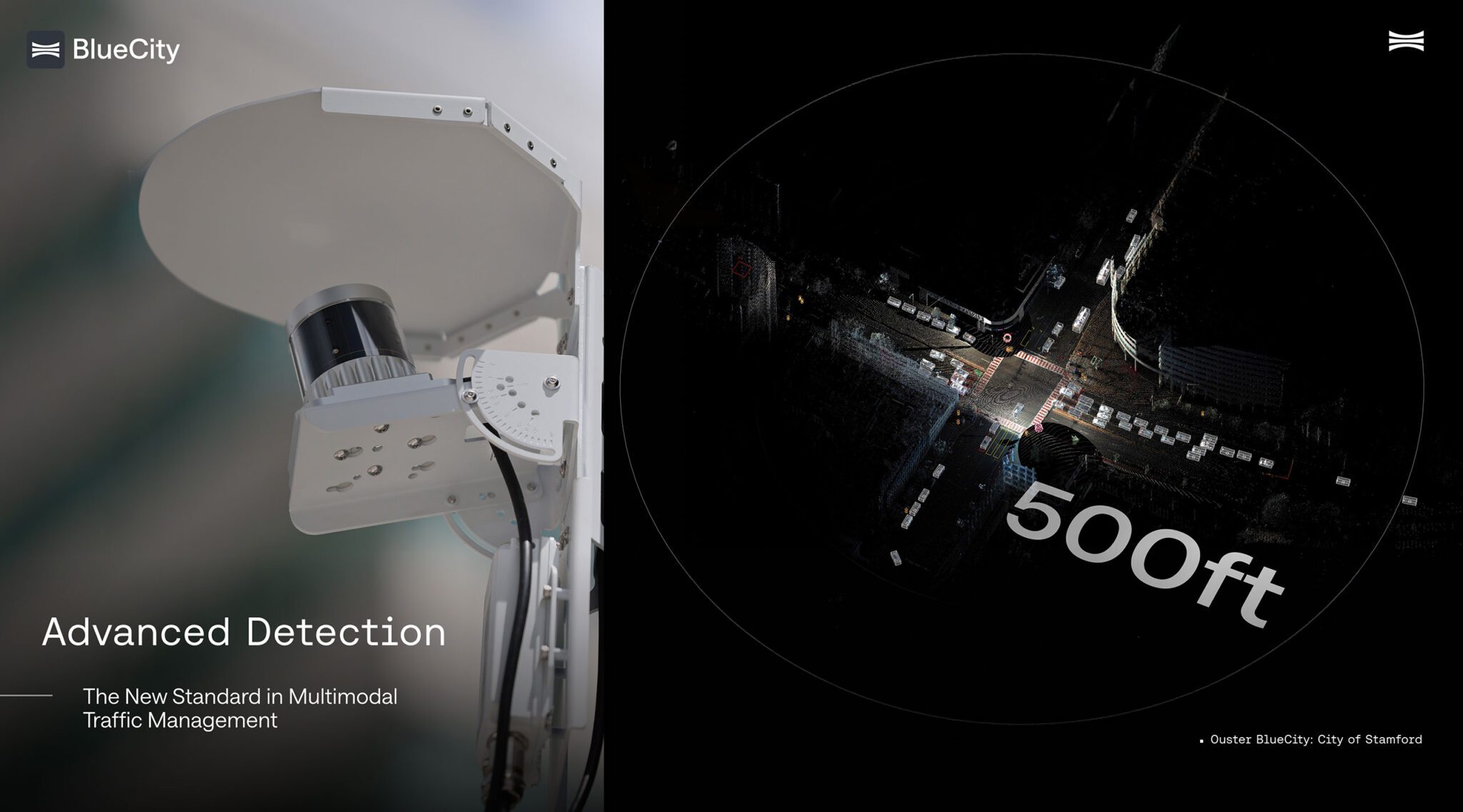
BlueCity, Ouster's autonomous mobility platform, benefits from this integration by improving scene understanding in diverse lighting conditions. The color data helps distinguish between objects that might appear identical in grayscale point clouds. Red brake lights, yellow warning signs, and white lane paint become immediately identifiable without relying on downstream AI models to infer meaning from geometry alone.
The real test lies in measurable outcomes. Ouster must demonstrate that color LiDAR reduces perception errors, lowers false-positive rates in object detection, and ultimately improves safety metrics. Better data doesn't automatically translate to better autonomous driving. The company needs to show that its BlueCity platform makes fewer mistakes in complex urban environments, wet conditions, and low-light scenarios where traditional camera-based systems falter.
This development positions Ouster against competitors like Luminar and Waymo, both advancing LiDAR technology for autonomous applications. Luminar's Iris sensor uses frequency-modulated continuous-wave (FMCW) technology, while Waymo's custom LiDAR focuses on extreme range. Ouster's color approach addresses a different problem. by baking visual information into the Li